





































There are many ways Autonomous Mobile Robots (AMRs) are changing how we do business. One such example is how hospitals provide medication to their patients. Most people have seen the autonomous vacuum cleaners called Roombas. They can navigate through homes to clean without being controlled by someone. Imagine one of these devices with a Ph.D. that can ride an elevator and quickly travel throughout a busy hospital to give life-saving medication to a patient.

There is one key factor that separates Autonomous Mobile Robots (AMRs) from Automated Guided Vehicles (AGVs). Both names indicate movement within a facility, but AGVs are much more limited in their mobility than AMRs. Warehouse managers use AGVs to move items around warehouses. These vehicles operate on rails and follow magnetic or painted lines on the floor. AGVs cannot change direction; they cannot turn, stop, or go in any direction other than what was predetermined. An AMR does not need to follow a rail.
Instead, an AMR operates like a car, using GPS to find its destination. Additionally, AMRs have extremely cautious drivers because they know they could cause harm if they collide with something. This makes all the difference when comparing how AGVs and AMRs move through space. An AGV can only follow a predetermined path. It cannot change course. It can only follow a predetermined path.
#Robot Simulation Software – Smart Essential Explanation for Robotics
The type of intelligence that enables an autonomous mobile robot (AMR) to navigate an environment directly impacts daily life. Take that last-minute order placed online. If numerous AMRs in a single facility were working together to fulfill this order, they could swarm to find your product. These AMRs would be able to avoid traffic congestion and get your order to the shipping department several hours sooner than if they didn’t have the capability to change direction quickly.
The same technology that makes logistics easier for mobile robots is changing health care. Instead of using the time of highly skilled and educated nursing staff to go on errands, AMRs will be able to pick up and transport lab samples, food, and other necessary medical supplies to areas of the hospital that need them. Highly skilled medical professionals will be able to focus on providing the best possible care to patients. These smart and flexible robots are no longer a futuristic concept, but instead the unseen force behind making our lives faster, safer, and more efficient. We are currently entering a new age.
Summary
Autonomous Mobile Robots (AMRs) are changing how warehouses and hospitals operate by safely and autonomously moving essential supplies throughout densely populated interior environments. This represents an advancement over “tracked” or “magnetic tape” guided vehicles, which were confined to navigating within predetermined paths or tracks. Using LiDAR and cameras, AMRs can identify obstacles and/or people and derive distance information from visual sensor data via Sensor Fusion.
SLAM (Simultaneous Localization and Mapping) is one of the primary enablers for this capability. SLAM is a solution to the classic “map vs. position” problem; it allows the robot to both generate a map of the space and determine its current position relative to the map in real-time.
Using its current position, the AMR will use dynamic path planning – similar to a GPS navigation application – to choose the best route to take to reach a destination based on factors such as time, traffic, etc., rather than simply taking the shortest route available. If the environment in front of the AMR changes, it can quickly adapt and navigate around congested areas.
In addition to ensuring safe navigation of AMRs in a given space, it is critical that an adequate degree of protection be provided during AMR use. The protective zone around the robot, created by its sensors, allows it to slow down, stop, or move away from an object (a potential obstacle), and to predictively detect approaching people, enabling smooth avoidance of collisions.
At larger scales, fleet management software can coordinate multiple robots and prevent congestion by efficiently assigning tasks to individual robots. Further, the AMR operates differently depending on the environment: Warehouse AMRs operate to maximize speed and throughput; Hospital AMRs operate to minimize risk and are socially conscious in their movements.
Autonomous Mobile Robots (AMRs): Move Independently without Fixed Paths

A major difference between the two is that Autonomous Mobile Robots (AMRs) can perceive their surroundings and plan a path to a destination based on that perception. They can also adjust their path based on changing conditions. For instance, if someone enters the aisle the robot is traveling down, the robot can stop, wait until the aisle is clear, and then continue traveling. AGVs cannot respond to changing conditions around them.
Autonomous Mobile Robots (AMRs) utilize a combination of sensors to support their navigation. Some common types of sensors used by Autonomous Mobile Robots include:
* LiDAR
* Depth Cameras
* Stereo Vision
* Ultrasonic Sensors
* Wheel Odometry
These sensors collect data that allows the robot to either create or reference a map of the area in which it is working. Once a map has been created, the robot uses this map information to determine its location on the map (usually via a process called SLAM, Simultaneous Localization and Mapping). Once the robot has determined its position on the map, it applies a path-planning algorithm to find the safest, most efficient route to the desired location. The robot continues to plan new paths to the same or different locations in real time while avoiding detected obstructions.
Autonomous Mobile Robots are being used by a growing number of warehouses to aid with several tasks, including:
* Picking
* Put-Away
* Replenishment
* Line-Side Delivery
The use of Autonomous Mobile Robots in warehouses can help reduce the time warehouse employees spend walking, improve the efficiency of moving products through crowded aisles, and allow them to continue working at full capacity during shift changes.
Autonomous Mobile Robots are also being used in hospitals to move items such as linen, food, medications, and trash in secured compartments. This helps hospital staff focus on providing the best possible care for patients and reduces the time they spend on routine deliveries.
#Revolutionary Cloud Robotics Explained for Everyone
Autonomous mobile robots also offer flexibility. In other words, if a facility has new racking, temporary construction, etc., that alters its layout, the robot can normally be remapped by updating the navigation system through software. The robot does not need to physically alter the environment to accommodate these changes.
The fleet management software will also assist in coordinating the operation of one or more Autonomous Mobile Robots (AMRs), assigning jobs to individual robots, coordinating their charging times, preventing collisions between robots, and prioritizing expedited deliveries.
Another important aspect is safety. Autonomous mobile robots operate at speeds allowed by local regulatory bodies. They operate within predetermined boundaries that are defined by “geofences”. The robots can stop immediately when required. Autonomous mobile robots were created to ensure safe interaction with people.
Implementations of Autonomous Mobile Robots (AMRs) can still experience success with some process improvements, like having assigned pick-up/drop-off stations, clear labels, reliable Wi-Fi connectivity (with local autonomy available as needed), and adequate employee training to enable warehouse staff to successfully interact with Autonomous Mobile Robots (AMRs).
Robot Navigation: Robot navigation enables safe movement through complex indoor spaces

Robot navigation has provided a mechanism for a robot to safely move through an interior space with multiple obstructions by equipping a mobile robot with the capability of determining its own position (location) relative to its surroundings, recognizing objects in its immediate proximity, and making decisions regarding what path to follow to reach a goal destination without colliding with the objects or surfaces in its vicinity during its travel.
Robot navigation has been instrumental in improving efficiency and reducing costs in warehouse management, hospital operations, and factory automation. Robot navigation has transformed robots from remote-controlled devices into reliable work partners that can safely traverse the same paths as humans and navigate around hazards such as other people, carts, doors, and changes in the physical space.
Robot navigation operates on three interdependent functions: Mapping, Localization, and Path Planning. The first function of Mapping is used to create a map of the environment. The second function of Localization is to determine the robotic vehicle’s location using this map, typically accomplished by fusing data from various sensors, such as LiDAR, Camera Images, Wheel Encoder Data, and Inertial Data. The third function of Path Planning is used to select a route.
Finally, Obstacle Avoidance will modify the robotic vehicle’s movement rate or direction based on the presence of objects that may have entered the space while it was traveling. As a result, Robot Navigation can support the complex motion of robotic vehicles in busy corridors, narrow aisles, and when a path is temporarily obstructed.
Given that Autonomous Mobile Robots (AMRs) operate in dynamic environments, navigation is important because the robot’s operating environment is constantly changing. Therefore, many AMRs use SLAM (Simultaneous Localization and Mapping) for navigation, enabling rapid deployment and operation even when the layout of the operating area changes due to moving shelves or corridor reconfigurations.
Moreover, effective Robot Navigation can enable “Human-Aware” behavior in which robots will yield to traffic at intersections, slow down or come to a complete stop when approaching an individual, keep a safe enough distance from other individuals as they pass by them, and behave in general in a way that is consistent with human logic. Thus, the number of near misses and the perception that a robotic vehicle is unpredictable are both minimized.
Fleet operation adds even more complexity than operating individual robots, as multiple Autonomous Mobile Robots (AMRs) operate in the same geographic space. The Robot Navigation system must control traffic flow, resolve deadlocks, and optimize for both speed and safety. This is accomplished using fleet software to direct individual AMRs, assign tasks, create one-way zones for the robots to navigate, and redirect them around the most congested areas. Each AMR still completes its own navigation and obstacle avoidance.
In Hospital Settings, the Robot Navigation would also be responsible for integrating with elevators, controlling doors, and restricting access to areas within the hospital where the robot is not allowed.
In Warehouse settings, the Robot Navigation would be responsible for directing the robot to the fastest path to a “pick face” while simultaneously avoiding forklifts and staging zones. As technology improves with sensors and algorithms becoming more sophisticated and complex, Robot Navigation will continue to improve the safety, efficiency, and utility of AMRs in their daily indoor work environments.
Mobile Robot Navigation: Navigation systems designed for moving robots in real spaces

Mobile Robot Navigation includes both the mechanical (hardware) and logical (software) aspects necessary for a mobile robot to physically move in a real-world space as opposed to a laboratory. For example, Mobile Robot Navigation in warehouses, hospitals, and campuses allows the robot to safely travel from point A to point B, while navigating around other entities (people, doors, carts, etc.) and unexpected obstacles. Successful Mobile Robot Navigation can be the difference between a pilot test and a long-term, reliable operation for Autonomous Mobile Robots (AMRs).
Mobile Robot Navigation generally starts with Perception. Each sensor used by the robot to detect and perceive its surroundings (LiDAR, depth cameras, stereo cameras, ultrasonic sensors, and wheel odometry) enables it to see the walls, shelves, and moving objects around it. Following perception, mapping and localization are the next two levels of Mobile Robot Navigation. Most AMRs use Simultaneous Localization and Mapping (SLAM) to create maps of their environments and determine their location within them. Once the robot has determined its location, the Mobile Robot Navigation system will plan and control its motion.
The Global Planning Level defines the path from the start to the end location. The Local Planning Level dynamically adjusts the robot’s velocity, halts it as necessary, and navigates around stationary and moving objects. This capability of Mobile Robot Navigation to operate on a local basis is one of the key reasons why Autonomous Mobile Robots (AMRs) can functionally operate in active facilities alongside entities (such as people), as opposed to using fixed paths or tracks. In addition to being capable of local operation, an ideal Mobile Robot Navigation System must account for constraints related to the robot’s turning radius, payload capacity, floor conditions, and safe stopping distance.
Mobile robots are implemented in the field, and while the implementation goes far beyond just clearing an obstacle course, the navigation of a mobile robot typically includes interaction with traffic patterns (one-way streets, right of way, speed limit, etc.), geofenced areas (restricted zones), and specific building characteristics (e.g., elevators, automatic sliding doors). When multiple AMRs operate in the same space, coordinating their motion (fleet management) minimizes bottlenecks and reduces the likelihood of two or more AMRs blocking each other while each unit continues to operate its own local Mobile Robot Navigation.
While “Smart” Mobile Robot Navigation has benefits, the best Mobile Robot Navigation is predictable. Employees need to understand how the robot will behave in various scenarios (e.g., at intersections, during turns, and when signaling intent) and interact with it accordingly during handoffs.
Mobile Robot Navigation provides consistent, reliable sensing, well-tuned planners, and clearly defined operational rules, enabling AMRs to operate safely and effectively in the real world every day.
Indoor Navigation: Indoor navigation allows robots to operate where GPS is unavailable

Indoor navigation systems enable robots to operate within buildings such as warehouses, hospitals, and manufacturing facilities, where GPS signals are unavailable or unreliable. The main function of an indoor navigation system is to provide a robot with a method to determine its position and orientation and to detect obstacles and potential hazards around it. Autonomous Mobile Robots (AMRs) utilize indoor navigation to safely and reliably transport items through crowded hallways and between different floor plans.
The majority of indoor navigation systems consist of hardware (sensors) or software, but they typically rely on some form of multi-sensor fusion. In particular, cameras and LiDAR sensors are often used to identify structural elements in the space, including walls, doors, and shelving. Wheel encoders and IMU’s are then used to track how far and in what direction the robot has traveled since the last reading from the sensor(s).
A common technique used in indoor navigation systems is simultaneous localization and mapping (SLAM), which allows a robot to build and/or modify a map of its environment while simultaneously locating itself on that map. The use of SLAM enables a robot to adapt to changes in the environment (for example, a pallet temporarily obstructs an aisle or a hallway is occupied by people).
In addition to sensors and SLAM, indoor navigation systems can employ infrastructure-based methods to improve precision and stability. Some examples include: placing QR codes or AprilTags at multiple points throughout the facility; utilizing reflective markers for LiDAR; measuring Wi-Fi RTT; using Bluetooth beacons; or using UWB anchor points to obtain very accurate distance measurements.
Indoor Navigation is sometimes linked to the physical environment in implementations (e.g., elevator management in hospitals, door management, and restricted-zone enforcement near patients). In warehouses, geofencing is used to enable Indoor Navigation systems to map forklift travel patterns and establish speed limits at intersections and “no-go” zones within staging areas.
Smooth Indoor Navigation is as much about safely navigating through crowds and around other people as it is about successfully reaching your destination. An AMR’s capability to recognize potential hazards along its route and to plan how it will get there enables it to slow down, give way to pedestrians, come to a complete stop, or divert from its original course. The ability to coordinate many AMRs (or “fleet”) further helps minimize congestion caused by multiple robots traveling along the same paths and competing for access to the same charging stations.
In practice, the success of Indoor Navigation depends on having accurate, up-to-date maps, clearly defined pick-up/drop-off points for each route, and reliable wireless connectivity at designated locations. With all three working together, Indoor Navigation enables consistent, GPS-free delivery of safe and efficient indoor mobility for AMRs, while enhancing both AMR operating time and overall operational effectiveness.
Indoor Navigation Challenges vs Solutions
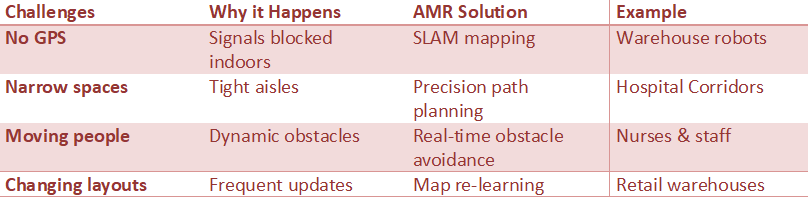
Statistic: Over 80% of AMR deployments operate in GPS-denied indoor environments.
Source: International Federation of Robotics (IFR)
https://ifr.org
Beyond Human Eyes: How Do These Robots “See” the World Around Them?
Amr’s vision of the world is created with a technology that may be foreign to most of you: LiDAR. Imagine a tiny, rotating lighthouse mounted atop Amr. The lighthouse emits thousands of non-harmful, undetectable laser beams every second. Each beam will hit walls, shelves, and people, creating a three-dimensional image of the environment. Amr can move through a building with ease, using the environment itself rather than needing any track tape or special floor markings.
LiDAR is extremely effective at determining the shape and distance of objects in the environment; it cannot identify signs or recognize specific objects. Here is where another technology takes over – cameras. They function in much the same way as the cameras on your smartphone. Cameras can provide the high-resolution detail required for the robot to read a barcode on a box, read the number on the floor next to an elevator, or determine whether a person is passing by or leaning against a fixed wall or pillar.
The unique aspect of Amr’s operation is the combination of LiDAR and camera data, a process known as sensor fusion. The two sensors work together to provide a better, more reliable understanding of the world than they could alone (i.e., the way you rely on your sight and hearing to stay safe while crossing a road).
With the two types of information combined (high-resolution camera images and an accurate 3-D model from the LiDAR), the AMR has a virtually superhuman understanding of its surroundings. However, simply being aware of the environment is only the beginning. The next task for the Amr is to use the information it gathered to build a continuous, map-based representation of the environment so that it can navigate.

How AMRs “See” the World

Example: AMRs combine multiple sensors to create a 360° understanding of their surroundings.
Source: NVIDIA Robotics Perception
https://developer.nvidia.com/robotics
How Does a Robot Build a Map of a Place It’s Never Been?
The robot has LiDAR and cameras to obtain pictures of the surrounding environment. Those pictures are snapshots; they do not produce a long-term map of the environment. Consequently, this system needs to capture each of these pictures in “real-time” and create an accurate, permanent map of the environment, which is a rather difficult problem. To accomplish this, the robot will use a technique called Simultaneous Localization and Mapping (SLAM).
SLAM resolves both basic problems simultaneously. The first problem is mapping (creating a map), and the second is localization (determining the robot’s position relative to the map). Think of being in a dark, unfamiliar building. All you have is a flashlight and a blank sheet of paper. If you wanted to draw the walls and doorways as you walk through the building, you would need to solve two problems at the same time.
The first problem is to use your flashlight to draw the walls and doorways on your sheet of paper—that is the mapping problem. The second problem would be to locate yourself on the paper as you moved around the building—that is, the localization problem.
In other words, as you draw the walls and doorways on your sheet of paper (the mapping problem), you would also need to determine where you were in relation to the walls and doorways (the localization problem). The robot performs the same task continuously as it travels throughout the facility.
This is one reason why the constant mapping/self-localization cycle is so important for the robot to operate autonomously. The brain interprets raw data from the LiDAR and camera to create a useful map of the facility. The robot does not require a pre-existing map or painted lines on the floor to find the most efficient route between the pharmacy and the patient’s bedside. Once the map is made, the robot can determine the best course to travel between points within the facility.
AMR Navigation System: AMR navigation systems combine mapping, localization, and path planning
Beginning with mapping. The AMR navigation system creates or uses a digital version of the physical environment — walls, passageways, storage lanes, and significant landmarks. Many AMRs use SLAM (simultaneously localize and map) to rapidly develop an environment map and continually update it. In spaces with constant change, the map includes static items (such as walls) and rules governing movement (for example, one-way, speed limits, etc.).
The second step is localization, which asks, “Where do I think I am now?” Using sensor information from various sensors (LiDAR, cameras, wheel encoders, IMU), the AMR navigation system estimates where the robot is and in what direction it is facing.
Accurate and robust localization is crucial for precise docking, arrival at specified transfer points, and navigation through narrow passageways, so the robot does not drift off to shelving or equipment. In addition to this functionality, many facilities provide aids to enhance the positioning accuracy of the AMR navigation system for repetitive routes, including markers, QR codes, and/or UWB anchors.
I also made minor word changes and grammatical adjustments to the text. I tried to make it read more like you would write something.
The primary purpose of the Path Planning is to determine how the vehicle will travel from the starting point (origin) to the final point (destination).
Typically, the Global Planner is used to determine the most efficient route to be traveled. The Local Planner is used to slow down, stop, and navigate around objects in real time. It is especially useful in hospital and warehouse environments due to the constant movement of staff, carts, and pallets.
The AMR Navigation System can be tuned to provide the optimal balance between speed, comfort, and safety. As a result, the robot’s predictable behavior will give staff confidence in using it.
When multiple robots are used together, the AMR Navigation System is usually integrated with a Fleet Software System. In this configuration, the Fleet Software will assign tasks, prevent collisions, and manage the charging cycle of all robots. The Fleet Software helps eliminate congestion caused by the AMRs while ensuring products are delivered on time.
In general, an AMR Navigation System is required for making AMRs practical in everyday working conditions. The Navigation System enables the robot to accurately locate itself, safely navigate the workspace, and reliably complete tasks even as the workspace changes over time.
Robot Pathfinding: Robot pathfinding finds the safest and fastest route in real time

Robot Pathfinding generates the safest and most effective path on the fly by using the physical map, sensor information from each move, and specific operational standards to guide the path-generation process.
Robot Pathfinding is used to assist robots in navigating the tight aisles of warehouses and the crowded corridors of hospitals while avoiding collisions and delays through intersecting paths.
A reliable Robot Pathfinding solution is critical for Autonomous Mobile Robots (AMRs) because their operating environments are constantly changing. People will travel unpredictably; carts will enter or exit the area; and the route will change during the journey.
Generally, Robot Pathfinding starts with developing a Global Plan. The robot develops a global plan to select the shortest distance from its current location to its destination using a map developed by Simultaneous Localization and Mapping (SLAM). The global plan prioritizes efficiency: shorter distances, less congestion, and lower risk. In addition to these priorities, Global Robot Pathfinding may also consider operational rules, such as one-way lanes, no-go zones, speed restrictions in nurse’s station areas, and preferred routes for transporting large loads.
Next is Local Planning. A great global plan is quickly destroyed by a pallet in an aisle, a person stopping in the hallway, etc. Local Robot Pathfinding translates real-time sensory inputs into route adjustments: slowing down, yielding, routing around obstacles, or completely stopping if no safe route exists. Local Robot Pathfinding helps keep AMRs safe in both human and robot environments, and “fast” can never be chosen over “predictable.”
The way an autonomous vehicle finds a path is fundamentally connected to its safety. The autonomous vehicle will always keep a safety boundary around itself and will never allow itself to come closer than the stopping distance. And, the autonomous vehicle will always pick a course of action that minimizes potential hazards. (Example: it would never make a quick turn when going too fast, and it would never drive past anyone.)
In hospitals or other health care environments, the robot’s pathfinding can be programmed so that during off-hours (i.e., nighttime), it takes less-traveled routes. Similarly, in warehouse environments, the robot’s pathfinding can be programmed to maximize the amount of material moved through the warehouse (throughput), while at the same time providing the right-of-way to forklifts and people.
When multiple autonomous vehicles operate in the same environment, the additional layer of “Fleet Coordination” enables even greater functionality. In addition to finding a route, Autonomous Vehicle Pathfinding receives communication from a Fleet Manager and assists in managing traffic flow, eliminating deadlocks, and congestion points. This type of fleet coordination ensures that Autonomous Vehicles reach their destinations on schedule, eliminates idle time, and does not block necessary travel paths.
Autonomous Vehicle Pathfinding has many practical, measurable aspects: the ability of a vehicle to find a route quickly, move smoothly, arrive on time, and communicate effectively and safely with people is a measure of how well the vehicle is functioning. Autonomous Vehicle Pathfinding is the real-time decision-making process that enables Autonomous Material Transporters (AMRs) to operate effectively in changing environmental conditions.
Not Just the Shortest Path: How Do AMRs Plan Routes Like Waze for Warehouses?
Navigation maps are just a starting point — navigating within an active space can be a completely different task. Those familiar with navigation applications, including Google Maps, Waze, and others, understand how this technology is applied. An Autonomous Mobile Robot (AMR), doesn’t merely search for the shortest route to destination, but instead will identify the best possible route at all times.
Additionally, it considers factors such as digital traffic data from other robots, areas that are congested and have been previously identified by the AMR, and areas that are temporarily restricted and/or off-limits due to other factors. It is the AMR’s ability to make intelligent decisions that enables it to perform its logistical tasks better than if it were to create a “traffic jam” in the warehouse.
The AMR continuously calculates its path using dynamic path planning. The term “Dynamic” is significant because it implies the path is never fully planned. The same hospital hallway that was open to travel a minute ago may be obstructed by a gurney at the present time, and the same warehouse aisle that was unobstructed a few minutes ago may now be blocked by a forklift. The AMR’s internal software operates like a live traffic reporter, providing real-time information about its path. The primary role of autonomous robot warehouse routing is to continuously adjust the AMR’s path in real time based on new sensor data and input from the central fleet management system.
Ultimately, thinking quickly and making decisions are what make an Autonomous Mobile Robot (AMR) reliable. If the robot encounters a blockage in its original path, it will not just wait for help but will immediately compute a detour. The robot will select the best possible detour to get to the intended destination.
In addition to flexibility in the face of unpredictable events or circumstances, adaptability is key to safely navigating a human-populated area. There is another related question about this issue: What would happen if the unexpected obstacle to the robot’s movement were not a box but a human stepping into the path of a 300-pound robot?
Path Planning Strategies

Example: AMRs reroute instantly when aisles are blocked-just like GPS apps.
Statistic: Dynamic routing improves efficiency by 15-25%.
Source: McKinsey Automation Logistics
https://www.mckinsey.com
Autonomous Navigation: Autonomous navigation lets robots plan and adjust routes independently

Autonomous navigation is the robotic ability to make its own decisions about where to move to complete a mission and how to navigate through space around other robots. Autonomous navigation enables a robot to move through an environment without following a predetermined path with known waypoints (e.g., a warehouse) or being manually directed from a remote location (e.g., a vehicle).
For example, in environments such as warehouses, hospitals, and manufacturing facilities, there are large numbers of people, carts, and movable parts (e.g., automated sliding doors) that create a dynamic environment. Changes in the environment require constant updates to the optimal path. Autonomous Mobile Robots (AMRs) use autonomous navigation as the critical capability that differentiates “movement” from “utility.”
An autonomous navigation system has four primary components: perception, localization, planning, and control. Perception refers to the sensors the robot uses to perceive its environment and detect potential obstacles. Sensors may include, but are not limited to: lidar, cameras, ultrasonic sensors, wheel encoders, and inertial measurement units (IMU’s). Localization involves determining the robot’s position on a map of the area.
With many localization methods utilizing Simultaneous Localization And Mapping (SLAM), robots can create maps of their environments and determine their positions as those environments change. After determining the robot’s location and the potential obstacles around it, the Autonomous Navigation System will calculate the shortest path from the current position to the destination and generate the control signals needed to execute it safely.
The full benefit of autonomous navigation is realized during unplanned events. For example, a robot may slow down to yield to traffic, take an alternative path, or wait until an obstacle moves so it may continue. Autonomous navigation systems are particularly valuable in applications that require a high level of customer service during periods of high demand (e.g., peak hours, shift changes), construction, and/or unforeseen disruptions to the facility’s normal operation.
Autonomous navigation systems can enforce customer-specific rules (e.g., geofencing, speed limits) and adjust routing based on load characteristics (e.g., heavy loads use preferred routes).
Autonomous Navigation works in conjunction with Fleet Management in Multi-robot systems. The Fleet Management layer enables task assignment and congestion reduction; local decision-making, such as passing, merging, and safe stopping, occurs for each individual robot. Integrating these two layers facilitates deadlock avoidance for autonomous mobile robots (AMRs) and improves overall throughput. However, this collaborative effort does not result in either overly cautious or overly aggressive behavior by an individual robot.
Safety through Autonomous Navigation is enabled through conservative braking distances, obstacle classification, emergency stopping, and predictable behaviors toward people. Most AMRs use audible/visual signals to communicate intent to staff, improving interactions.
Autonomous Navigation enables consistent indoor transportation; it can navigate a route, respond to real-world surprises, and complete missions reliably — all without continuous human supervision.
What Happens When a Person Steps in Front of a 300-Pound Robot?
Fortunately, the answer isn’t: a lot. The robot will just completely stop. The robot won’t be able to get close to you before it detects you through its many sensors (the rotating Lidar and 3d camera). These sensors create a safe bubble of space surrounding the robot, and you can’t enter this bubble until the robot stops. When you do break into this bubble, the robot’s braking system will automatically slow down to a safe stop using its main safety procedures. In a way, the emergency braking systems on today’s cars are like this, but they are generally less reactive when working in warehouses and hospitals.
While the robot’s constant scanning for obstacles is designed to prevent collisions, its “brain” also uses dynamic avoidance to identify them. The robot’s “brain” can distinguish between a stationary box and a person approaching it. The robot’s “brain” will assess how fast an object is moving and in which direction it is going to determine whether it is a person and where they are going. Instead of just coming to a complete stop and blocking the hallway, the robot will typically recalculate a new route around the person and move aside to let them continue with their day.
The robot’s reflexive actions, which rely on its ability to learn, are also the foundation of the robot’s design. Therefore, they must comply with many strict medical and manufacturing safety regulations and guidelines. To further ensure the safety of both humans and the robots themselves, numerous layers of safety have been implemented, including complex software and an actual emergency stop button on the robot itself. For example, a nurse could easily walk past an AMR without giving it a second thought, because the AMR would be unable to start moving again unless the nurse was out of its line of sight.
Safe one-on-one interaction between humans and robots has enabled the creation of collaborative work environments. However, if you wanted to implement this level of reliability in a busy warehouse environment, how would you avoid creating a robot traffic jam?

Human-Robot Interaction Safety Table

Example: Hospital robots automatically slow down near patients and staff.
Source: ABB Robotics Safety Standards
https://new.abb.com/products/robotics
How Do You Prevent a Robot Traffic Jam in a Busy Warehouse?
The fleet management software serves as the “brains” of the operation, connecting all of the robots working on a warehouse floor just as the air traffic control tower coordinates the movement of airplanes from one end of the country to the other.
The central management system continuously monitors each robot’s location, the battery’s remaining charge, and the specific job to be performed. Therefore, when a new job becomes available, such as picking up a specific product to fulfill an order, the management system will identify which robot is positioned to best accomplish the job and has enough charge to do so (just as Uber identifies a driver with the most efficient route to the passenger).
Ultimately, the software ensures that robots operate throughout the warehouse, delivering products to customers as quickly and efficiently as possible. Although each robot can operate independently, the fleet management software enables coordination of multiple robots to reduce congestion or bottlenecks within the warehouse.
For example, although a single robot may successfully maneuver around a person who suddenly steps into its path, the fleet management software will prevent multiple robots from attempting to enter the same narrow aisle simultaneously. Additionally, the software will generate each robot’s route, allowing some robots to stop momentarily so others can pass.
Therefore, the fleet management software enables high levels of coordination among the robots, similar to how traffic lights and street signs coordinate automobile traffic in cities. High levels of coordination are especially critical in busy warehouse operations; however, they are also common in many other environments. For example, a hospital would need to coordinate the activities of medical staff, patients, and equipment to provide safe, effective patient care in a timely manner.
Warehouse Aisles vs. Hospital Hallways: Why Each Environment Is a Unique Challenge

The physical characteristics of an Autonomous Mobile Robot (AMR), including the type of sensors it uses and how it moves, will remain the same regardless of where the robot operates. However, the personality or way the robot acts may vary greatly depending on the type of operating environment it finds itself in. An AMR optimized for use in a large warehouse could cause a disaster if allowed to operate in a hospital environment.
Likewise, an AMR optimized for a hospital environment could be a disaster if deployed in a warehouse. Therefore, the one-size-fits-all approach does not apply here. The software that controls the AMR must be specifically tailored to the environment in which it is being operated. Training a driver to operate both on a highway and in a quiet school zone might help illustrate the extent of training required for the AMR to adapt to different environments.
Warehouse environments focus solely on achieving maximum speed and efficiency; they are usually large, structured, and designed with machines in mind. In a warehouse environment, the primary goals of an AMR are to find and/or transport products down the long, relatively predictable paths through the warehouse.
In a warehouse environment, the primary obstacles to the successful operation of an AMR are avoiding collisions with other mobile equipment and with robots that share the warehouse space. The Fleet Manager works like a traffic controller on highways, controlling the flow of each AMR to ensure safe, efficient navigation through the warehouse at high speeds and meet the warehouse’s extremely aggressive logistics schedules.
While warehouses are areas where you can predict when your equipment needs maintenance, a hospital hallway is the opposite. A hospital hallway is an ever-changing, unpredictable space with people who are more important than all the boxes you store in a warehouse. Doctors, nurses, patients, and family members are always moving around the hospital, sometimes while feeling stressed or in emergency situations.
As such, in a hospital setting, the AMR will move at a much lower speed and focus on both individuals’ safety and their awareness. The hospital AMR should be programmed to be very cautious, yield to people, and provide enough space to prevent collisions. This is similar to how a courteous pedestrian would navigate through a crowded sidewalk.
This is also the time when we see the capability to modify/customize the AMR navigation system. The AMR has been programmed to act in a completely different way from before. As mentioned earlier, the AMR’s programming was modified to create a new “personality” and/or behavioral profile. For example, a hospital AMR would be able to reach a lower top speed than a warehouse AMR, and it would accelerate more slowly and detect obstacles more sensitively. This would assure that the AMR is never perceived as intimidating. The AMR was also programmed to prefer routes traveled by fewer people (even if these routes may take longer) to minimize disruptions.
Warehouse vs Hospital Navigation Differences

Example: Warehouse robots prioritize speed, while hospital robots prioritize patient safety.
Statistic: Healthcare AMRs are growing at >20% CAGR due to demand for automation.
Source: MarketsandMarkets Healthcare Robotics
https://www.marketsandmarkets.com
The Future Is Here: AMRs Aren’t Just Carts, They’re Smart Teammates
“Using AMRs as an example of how automation has advanced to include ‘intelligence’, their ability to see (laser eyes), feel (camera senses), and learn (digital brain) are all part of creating a ‘map’ for them to follow. They have the intelligence to quickly identify and respond to obstacles thanks to their fast reflexes. What was once a ‘black box’ has now become a clear-cut three-step process of: sense, think, act.
The videos and articles I find of warehouses and hospitals demonstrate what the workplace will likely look like in the future. The videos and articles show us the differences between old “basic” machines and new intelligent ones. Intelligent machines do more than just move packages and supplies. They represent a vision of the workplace. That vision represents giving nurses the opportunity to provide one-on-one care to patients during their hospital stay and having critical orders arrive on time. In the end, machines will not replace people. Machines will replace those dull, distant, and hard tasks so we can focus on the relationship that makes a difference.”
Conclusion
Navigation by autonomous mobile robots (AMRs) happens when AMRs continually sense what is going on around them, locate their position relative to their surroundings, plan their next move based on that information, and adjust for changes in the situation in order to convert difficult-to-navigate interior spaces into stable and reliable pathways for AMRs to travel.
Using fusion of LiDAR, cameras, and other sensors, AMRs can establish a good sense of the presence of nearby people and objects, such as walls, shelving, and equipment. Through SLAM (Simultaneous Localization and Mapping), AMRs simultaneously know exactly where they are, and how the space surrounding them is structured – even while the condition of the surrounding environment continues to change.
Using this data as a basis, AMRs will be able to dynamically plan the most efficient routes through the building/facility/hospital and re-plan them instantly should a hallway become blocked, a corridor become congested, or there is a priority change of the assignments to the AMR.
In addition to the capabilities listed above, AMR Navigation Systems have been designed with the operating environment in mind. These systems include a multi-level safety methodology with features such as an early warning system, a gentler braking mechanism, and the ability to avoid obstacles, all of which enable robots to safely navigate the tight spaces found in humans’ daily lives. Additionally, the system’s ability to coordinate traffic flow among multiple robots, prevent congestion or bottlenecks, and assign the correct robot to specific tasks facilitates simultaneous management.
Ultimately, the result of these capabilities is to provide warehouse AMRs with real-world practical autonomy and ultimately lead to increased speed of fulfilling warehouses, consistency and predictability of internal logistics for warehouses, and more time for clinical personnel in hospitals. As the sophistication of navigation software improves, AMRs will be seen as capable teammates in the normal course of business.
FAQs
- How do AMRs “know” where they are inside a warehouse or hospital?
AMRs localize using SLAM techniques that fuse LiDAR and/or camera data with odometry and inertial sensor readings to determine their position at a given moment within a map. - What sensors do AMRs use to detect people and obstacles?
Almost all AMRs use LiDAR and 2D/3D cameras and often incorporate additional sensors, such as ultrasonic and bump sensors, to detect potential obstacles and maintain a safe stopping distance. - How do AMRs choose routes and avoid traffic jams?
Using dynamic path planning, these robots can adjust their route in real time when they encounter blockages, and, through fleet management software, multiple robots can be coordinated to avoid congestion and deadlocks. - Are AMRs safe to operate around staff, patients, and visitors?
Yes—AMRs are built with multi-layered safety features, including speed limits, obstacle avoidance, emergency stops, and rules of behavior (i.e., yielding in hallways) for each robot. - Why do AMRs behave differently in warehouses versus hospitals?
Warehouse environments prioritize speed and throughput, whereas hospital environments prioritize cautious, human-aware navigation—slower or faster speeds, larger clearances, and tighter zone restrictions.













{kind=link}
Comments 4