















Digital Twins for Robots are digital models that create a virtual representation of a robot. They take real-world data from the robot at this moment (such as position, current, temperature) as well as all of the design data for the robot (CAD drawings, kinematic equations, payload limits, etc.) The result is that users have a real-time view of what the robot is doing and how it compares to its intended design parameters.
A Digital Twin for Robots is always dynamic. It reflects changes in the environment in which the robot operates. This means that if you add a new piece of tooling, replace a worn part, swap out a different part, or change the robot program, the Digital Twin will automatically reflect those changes.
The Digital Twin for Robots allows manufacturing and warehouse teams to simulate a robot’s path, the time to complete one cycle, and the safe zone where the robot can operate without causing damage before making any physical changes to the robot’s cell. Engineers can test different configurations, validate reach and collision points, and ensure proper handoff of parts between robots and other equipment, such as conveyors or vision systems. By simulating the physical aspects of the robot’s operation, teams can minimize downtime, since every minute lost is very expensive.
#What Is a Digital Twin? 5 Powerful Ways Virtual Systems Create Smart Value
It’s also a way to increase performance after deployment. A Digital Twin for Robots allows you to align your intended behavior with your robot’s actual behavior, enabling you to determine whether there has been a ‘drift’ in your system, e.g., increased motion time, increased torque, increased vibration, etc. This will enable you to quickly analyze the cause of a problem and perform Predictive Maintenance on your components (i.e., service them based on their condition rather than at a predetermined calendar date).
Over time, you’ll be able to fine-tune your speed, acceleration, and path to produce the highest-quality product possible while minimizing energy use and mechanical wear on your equipment.
Typical Steps to Create a Digital Twin for Robots:
(1) A High Quality Model of Your Robot;
(2) An Interface to Ingest Data from Your Controller and Sensors;
(3) A Physics or Motion Engine to Simulate the Motion of Your Robot;
(4) Dashboards and Alert Capabilities to Provide the Operator.
Typical Barriers to Creating Digital Twins for Robots:
(1) The Quality of the Data Provided by the Sensor/Controller;
(2) Ability to Integrate Data from Various Vendors;
(3) Maintaining the Alignment of the Virtual Model to Changes Made to the Physical Robot (e.g., Swapping Tools, Updating Firmware);
Digital twin for robots are becoming a viable tool for reducing automation-related risks, shortening equipment commissioning times, and ensuring reliable system operation by converting robot-generated data into operational decisions that reduce downtime and increase productivity.
If you have at some point seen your vehicle’s icon on the map while using Google Maps, you have experienced a very basic representation of what a digital twin can look like. The image above is a digital “you” navigating a digital world. The digital twin receives real-time location data as you navigate the digital world.
If we were to apply the same principle to a large, high-dollar robotic system used in an industrial facility, we could create live tracking using a digital twin that is nearly identical to the actual robot. The digital twin for robots would allow engineers to identify problems or areas of concern before they occur. In addition, it would enable engineers to safely test new job functions in a simulated (virtual) environment. Creating a digital twin of a robot represents one of the most effective applications of robotics technology today and will likely represent one of the fastest-growing segments of the robotics industry over the next few years.
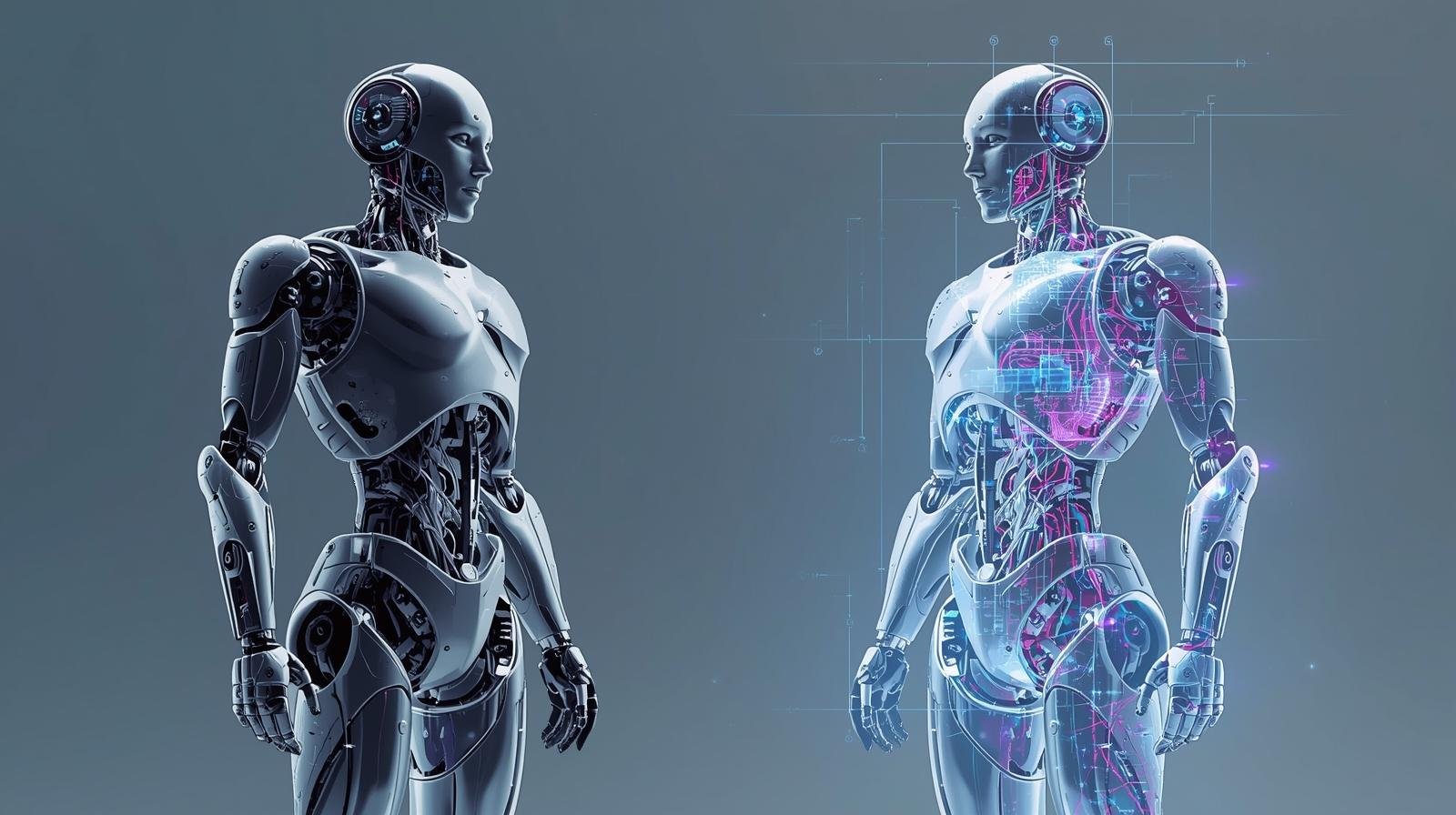
A static 3-D version of the robot is just one part of the equation when it comes to utilizing a digital robotic twin. Additionally, there exists a “live” connection to the physical robot that will provide so much more. Using the many sensor inputs from the actual robot, the live connection will serve as the “nervous system” of the digital robotic twin. It will continuously send data back to the digital robotic twin (the twin) about the robot’s current location, temperature, and speed.
Therefore, through the live connection, the digital representation is no longer simply a static graphic. It is now a dynamic digital twin that represents the robot’s current state and all its conditions/actions in real time. The digital twin for robots will not record the robot’s movement or condition—it will be a live duplicate.
The above explanation of what a digital robotic twin is is not necessary for an engineer to understand. What is being explained here is a basic concept that anyone with common sense and basic knowledge can easily understand. The article goes on to explain how these robotic digital twins are creating new global opportunities for robots, one robot at a time, using the five simple steps below.
Understanding the Robot’s “Digital Shadow”
The idea of “a Digital Twin” has moved beyond being a symbolic image on a map. Today, it has become a viable industrial instrument: a digital, functional, and dynamic duplicate (model) of a robotic unit that can learn, practice, and anticipate possible errors or malfunctions. The term “digital twin” does not refer to a simple digital photo of a robot. It refers to a fully operational model with actual data input. This enables robots to create a safer, more intelligent environment for people.
You will now feel confident when explaining the advantages of “Digital Twins.” “Digital Twins” are not just advanced smart manufacturing technology. They show the possibility of robotics. We create a nearly perfect model of the products and systems we use every day by building a virtual representation of each.
Step 1: Meet the Two Players – The Robot and Its Digital Ghost
A good way to think about a physical actor in this story is to think about the industrial robot. Remove all the acting and speaking parts of people in a movie, and replace those roles with an arm in a warehouse that could lift heavy boxes, or a welding machine in a car manufacturing plant that welds automobile doors. An industrial robot is a great example of how well engineers design robots. Robots are programmed to perform a series of predetermined motions precisely and to repeat them for hours. They only do what their programmers tell them to do.
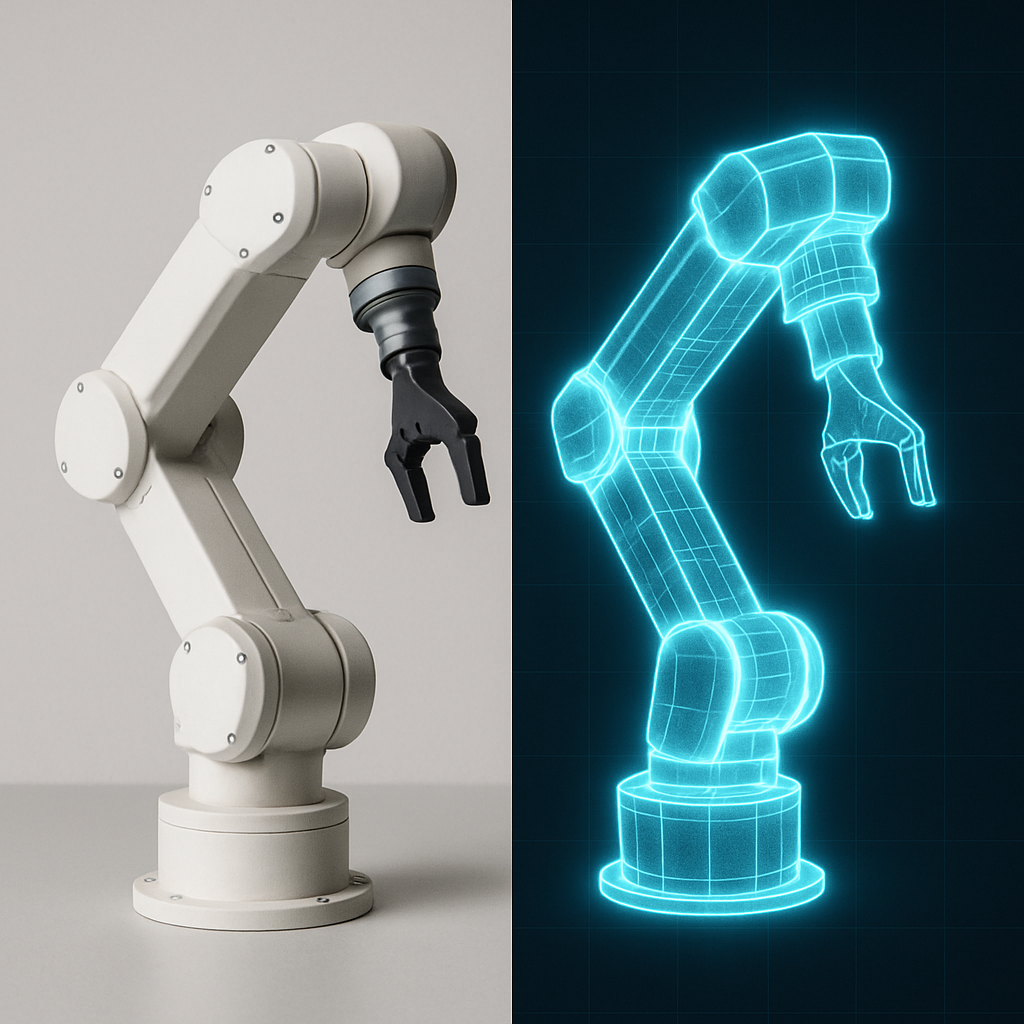
Now we will create a 3D virtual replica of the physical robot in a computer software. The digital replica of the robot will be identical to the physical robot (down to the smallest details, including each individual bolt), and the digital model will appear to move around on your screen just like a character in a first-class video game.
The digital replica of the robot will remain motionless and silent for a short period. It has now reached the initial stage of developing a “digital twin” concept. However, the key part of this concept remains missing.
Once the real-time communication connection is established between the two, the magic will begin. As with your cell phone’s GPS sending you information about where you are, and thus causing the GPS symbol to move on a map in real time, the various sensors on the physical robot send real-time information to the digital model of the robot (such as the physical robot’s location, speed, etc.) and cause the digital model to become a dynamic version of the physical robot.
At this point, the digital model has become a “real-time” version of the physical robot, or a “digital shadow”, that at all times accurately reflects the state of the physical robot. The digital model is no longer simply a static representation of the physical robot but rather a living dashboard for it.
Digital Twin Technology: Virtual Models That Mirror Real Robotic Systems
Using digital twin for robots technology offers two key ways to leverage it. First, you can develop a more robust pre-production process. Second, you can create better-performing robots once they are commissioned.
The first way to apply digital twin technology is during the robot’s development. As previously discussed, a digital twin provides a great environment to perform simulated tests. These tests provide numerous advantages. Engineers can test a variety of different paths, identify potential collision points, measure cycle time, and verify reachability before loading up the production program. Engineers can even use this technology to perform “what-if” tests.
They can simulate different grippers, modify speeds, move fixtures to new locations, or even add cameras without shutting down production. Additionally, if you use a digital twin to support the commissioning phase, you can often discover integration problems much earlier in the production process, thereby reducing costly rework.
After the robot is deployed, digital twin technology can be used to improve its reliability and overall performance. A digital twin for a robot can monitor how a robot’s motion and loads deviate from expected values measured by actual sensors and notify engineers of any variations or trends. For instance, if a robot’s joints begin producing higher-than-normal torque or a path becomes slower than expected, the digital twin will detect these deviations and guide the engineer to a solution.
Digital twin for robots can also be used to implement predictive maintenance through real-time monitoring of tool condition. This allows the service provider to identify potential failures before they occur by analyzing trends in data collected from the tools.
To have an effective digital twin there must be accurate representations of how each element interacts with other elements (digital model), a reliable flow of data from the elements being represented (data pipeline), and updates to the elements represented in the digital twin when those elements are changed due to tooling, payload, calibration, firmware, or changes to cell layout. In addition, the effectiveness of digital twins improves as they are integrated with sensors, robot control systems, and production equipment. When viewed as an operational component rather than a one-time project, the effectiveness of digital twin technology improves.
Future generations of digital twins will enable fleets of robots to self-coordinate their operations to optimize throughput and assign tasks to individual robots within a facility. Future generations of digital twins will provide a platform to quickly roll out automation, increase downtime, and improve the ability to accurately forecast quality issues.
Step 2: The Virtual Playground – Why Give a Robot a Twin?
Why would anyone create a digital version (or “ghost”) of a machine that exists physically? The reason is straightforward: Risk. Industrial robots are extremely costly to purchase; developing a program to perform a new function is also complex. If a programmer makes a small error when programming a robot, there may be a collision, damage to the robot, or even shutdown of the entire manufacturing process, resulting in a significant financial loss. A digital twin for robots provides engineers with the luxury of a “Do Over” Button.
Simulation fits perfectly into the model above. Think of simulation as a video game or flight simulator, but for the robot. In a simulated environment (the virtual world), engineers can develop new ideas, test the robot’s limits, etc., without risking damage to the actual robot. Engineers can ask questions like “What will happen to the robot’s speed if I increase the arm by 20%?” and receive immediate feedback from the simulation. Simulation is a valuable tool for developing a robot’s operational capabilities without causing a single scratch on the physical machine.
In addition to testing the robot through simulation, the digital twin enables offline programming— also known as “Teach the Twin First”. Suppose the physical robot is engaged in assembling products on the factory floor. At the same time, an engineer in an office can be training the digital twin to perform an entirely new function. Once the new program has been developed using simulation, it can be installed on the physical robot, enabling task switching with minimal downtime. Products don’t need to stop so the robot can learn a new trick.
Ultimately, the virtual world of simulation is simply a way of working smarter, not harder. Companies will save significant time and money and reduce the number of accidents. Companies will be able to optimize their robots’ operational capabilities. However, for this virtual practice to succeed, the digital twin must be a perfect mirror.
Digital Twin Benefits: Reduce Risk, Cost, and Development Time

The initial advantage for robotics teams from the use of virtual digital twins — a digital version of a real-world system — will be to have more visibility into how all aspects of a robot (and/or robots), including its tooling and the surrounding cell environment, should operate versus how it actually operates in real time. The well-developed Digital Twin for Robots has created an effective “sandbox” for teams to make decisions with a high degree of confidence.
Risk avoidance is arguably one of the largest advantages of a Digital Twin for robots across multiple industries. Teams can identify and validate safe operating parameters, defined safety zones, and defined hand-off points in the digital model prior to testing them physically on the plant floor, where a serious issue, such as a potential collision, reaching a limit of travel, or unstable motion, may not be discovered until it is too late. With a Digital Twin for Robots, teams can test thousands of different configurations of a robot’s performance (e.g., part positioning, payload, speed) without jeopardizing the safety of people, equipment, or production.
Another large advantage of a Digital Twin is cost savings. The cost of building a prototype, reworking it, or having the robot take longer than necessary to come online is very high. By developing and testing design concepts such as layout, gripper designs, and cycle times in a digital format, teams eliminate the need to make last-minute design changes and save thousands of dollars. In addition, the use of a Digital Twin for Robots allows teams to build programs offline and create seamless task transfers, which in turn reduces downtime and creates an environment for continuous improvement while minimizing disruptions.
The Speed of Development is where most of the Digital Twin’s Benefits occur. When using digital twins in testing, the team can iterate on their software design faster than they would without them. They can do this because the digital twin for robots will allow them to test different versions of the software, collaborate with others at other locations (remotely), and document how they worked in a reproducible manner.
Upon initial entry into operational mode, a Digital Twin for Robots will have the capability to identify “bottlenecks” that may be occurring (i.e. robots standing idle for extended periods of time; robots being sequenced poorly); and address those bottlenecks before customers begin complaining about delays.
Once a Digital Twin is in operational mode, Operational Reliability will be built upon additional Digital Twin Benefits. The twin will have access to expected vs. actual performance data, and therefore will be able to expose the “drift, “” wear, or “miscalibration” of an operation, which can lead to predictive maintenance and help identify the cause of problems prior to equipment failure.
Therefore, the Digital Twin Benefits that will provide the greatest benefit will come from building a more predictable robotic system (fewer surprises, fewer costly corrections, and shorter development cycles from conceptualization to stable production).
Measurable Benefits of Robot Digital Twins
| Benefit Area | Impact |
|---|---|
| Development time reduction | 29-50% faster product development |
| Maintenance cost reduction | Up to 30% lower costs |
| Downtime reduction | Up to 50% less unplanned downtime |
| Operational Efficiency | 10-25% improvement |
| Error reduction | Significant decrease via virutual testing |
Source: Gartner Digital Twin Research
https://www.gartner.com/en/information-technology/glossary/digital-twin
Robot Simulation Software: Test Robotic Behavior Before Real Deployment

Robot simulation enables a team to test a robot and its associated work cell in an online environment before producing any parts on the shop floor. Robot simulation verifies a robot’s reach, payload, cycle time, collision risk, and safety zone requirements, and allows testing of various tooling and layout configurations. Robot simulation software eliminates many of the surprises the engineering team encounters during commissioning, enabling projects to go directly from design to production with fewer delays.
Robot simulation software allows engineers to test and validate their robot’s motion offline. After testing and validating their robots’ motion, engineers can upload the validated motion to the robot controller. This significantly minimizes the amount of trial-and-error testing required for the robot. Robot simulation software allows engineers to validate how all elements of the robot’s work cell are working together. The robot simulation software will allow engineers to test how all components of the work cell interact, i.e., the fixture, conveyor system, sensors, and guard rails as designed.
Using real-world data in simulation software will enable the simulation to serve as a digital representation of the robot. A digital twin is a virtual model that links to the live signals of the physical robot. These live signals include, but are not limited to, the state of each joint, alarm conditions, and other process-related metrics.
#Robot Simulation Software – Smart Essential Explanation for Robotics
Integrators can use robot simulation software to perform “what-if” testing. A user can run a simulation to see how a change will affect the system (example: change a gripper, change the approach angle, slow down the robot, or add an inspection). If the simulation shows a bottleneck or collision condition, the user can fix it in the simulation before making physical changes to the equipment. This ability is especially useful for integrators who have short timelines to meet or incur high costs when the equipment is down. The digital twin for a robot takes this benefit one step further: as tools age, payloads change, or programs evolve, the model stays current.
“Robot simulation software can also be used to estimate production capacity during the initial start-up phase so that the workload on all of the robots can be distributed equally. Additionally, Robot Simulation Software can be used to test handoffs and timing requirements for robotic collaboration and high-speed pick-and-place applications. Once you feed actual machine performance data back into the model, a Digital Twin of a robot can detect variations from expected cycle times and rising torque values that may indicate mechanical failure.”
Robot Simulation Software can support continuous improvement of a robotics system during operation. The team can simulate upgrades to the robotic system, new product types, and configuration layouts using a digital twin; all of this can be done without actually testing, reducing the need for trial runs and scrap parts. The digital twin will assist the team in identifying differences (“planned” vs. “actual”) between what was intended for the robotic system and how it performs.
Robot Simulation Software and Digital Twin for Robotics are best used when the digital representation remains up to date and accurate (payload, calibration, tool center point) and incorporates realistic constraints (speeds, acceleration, singularities), and when updates to the physical environment are represented in the digital environment. When used correctly, Robot Simulation Software and Digital Twin for Robotics enable teams to deploy automation more quickly, more safely, and with greater reliability.
Simulation vs Real-Time Robot Digital Twin
| Feature | Robot Simulation | Robot Digital Twin |
|---|---|---|
| Data source | Predefined scenarios | Live sensor data |
| Accuracy | Limited realism | High real-world accuracy |
| Updates | Manual re-run | continuous updates |
| Use Case | Design testing | Real-time monitoring & optimization |
| Feedback loop | One-way | Two-way interaction |
Example: A simulation tests movement paths, but a digital twin for robots adjusts paths in real time based on actual factory conditions.
Source: Microsoft Azure Digital Twins
https://learn.microsoft.com/en-us/azure/digital-twins/overview
Step 3: The Magic Connection – How the Twin Knows What the Robot is Doing
The connection between the physical robot and its digital counterpart is called the sensor network. This sensor network is like the robot’s nervous system. The wearable device – a pedometer or heart rate monitor, for example – records the user’s experience (the number of steps taken, their heart rate). In comparison, the physical robot uses many sensors to record each movement it makes and the many aspects of the environment it interacts with (position, velocity, temperature, etc.). Each time the robot takes an action, it creates data that gives it a sense of its environment and allows it to provide feedback on what it experienced.
The digital twin receives this data from the physical robot continually, not once per day. An appropriate analogy for how the physical robot and digital twin work together is an automobile moving on a map of the surrounding area, which can be viewed on a smartphone. As the automobile moves, its path on the smartphone moves as well.
The way in which the robot interacts with its digital twin is identical. Through continuous updates of real-time information, the digital twin will be an up-to-date, minute-by-minute image of the actual robot (i.e., not just a static drawing). It is this continual flow of real-time information that allows the digital twin to become “alive” and not just a static representation.
Two-way communication exists between the robot and the digital twin. The robot sends status information to the digital twin. Engineers can also send perfect programs from the digital twin to the robot. When an engineer has successfully tested a program for a task in the digital twin’s simulated environment, he or she can be confident deploying the refined program to the physical robot.
The ability to communicate in both directions (receive input from the robot and send output to the robot) is what allows the digital twin to operate. Once two-way communication is established, the digital twin can do more than just show the robot’s present state; it can begin predicting future states.
Robot Digital Twin: A Live Digital Replica of a Robot
The Digital Twin of a robot represents it physically in a virtual form in real time using sensor and system data. This is different than a static 2D or 3D model of a robot, since this model would be updated constantly based on real-time data inputs from the robot’s systems. The Digital Twin provides a reference point for users to understand how their robot works, identify issues, and improve performance by planning modifications with fewer attempts.
A Digital Twin of a robot is beneficial for robotic engineering and commissioning teams to confirm that the robot can access a desired area, avoid other objects, and perform tasks within the required time frame prior to deployment in a production setting. Engineers can use a Digital Twin for robots to simulate possible paths, adjust the tool center point location, determine whether there are singularities, and verify the safe working area.
If a team utilizes a Digital Twin for robots early in the development process, they may be able to minimize costly rework late in the development cycle. Many layout and integration challenges may be identified and resolved prior to installation. Teams using a Digital Twin for robots will also have the opportunity to develop and update offline programs for the physical cell while the cell remains operational.
The use of a Robot Digital Twin in Operations provides an opportunity to create a digital version of the robot that continually monitors its performance and enables ongoing improvements. The Robot Digital Twin enables comparison of actual cycle times and loadings with expected values, so that drifts caused by wear, payload changes, or process variations are identified.
In addition, the Digital Twin for Robots can assist with predictive maintenance by tracking trends such as increased torque, vibration levels, or thermal signatures, which typically occur prior to mechanical failure, thereby enabling proactive service scheduling rather than the typical reactive downtime.
The Robot Digital Twin must be updated regularly, like other production assets, to remain valid. Calibration updates, tool changes, payload definitions, firmware updates, and cell modifications should be entered into the Digital Twin promptly. Through disciplined practice, the Robot Digital Twin will become a “living” single source of truth for cross-functional teams; including engineering (to test new ideas); operations (to ensure stable performance); and maintenance (to take early action).
Finally, the Robot Digital Twin may also offer fleet-level insights over time by establishing a common method for measuring performance and health across all robots, lines, and sites.
Robot vs Digital Twin – Side-by-Side Comparison
| Aspect | Physical Robot | Digital Twin |
|---|---|---|
| Form | Physical machine | Virtual software model |
| Data | Sensor readings | Real-time mirrored data |
| Function | Performs tasks | Simulates and predicts behavior |
| Updates | Hardware changes required | Software updates instantly |
| Risk Level | High (real-world errors) | Low (safe virtual testing) |
Example: A warehouse robot physically moves packages, while its digital twin for robots simulates movements and predicts inefficiencies.
Source: IBM – Digital Twin
https://www.ibm.com/topics/what-is-a-digital-twin
Step 4: Predicting the Future – Two Superpowers of a Robot’s Twin
Having established a live, two-way connection with the digital twin, it has moved well beyond being simply a mirror. The digital twin now enables two super-powerful capabilities, allowing engineers to anticipate potential failures and improve how the operation is conducted, all without risking damage to the physical system. The predictive and optimization capabilities of the digital twin enable a reactive manufacturing facility that continually fixes problems as they arise to become a proactive manufacturing facility that prevents those problems from arising in the first place.
1. “The Fortunate Tellers” (Predicting Problems): Given that the twin experiences the exact same stresses as the physical robotic device, it can indicate at an early stage the onset of wear and tear that would otherwise go unnoticed by the human eye. Essentially, the digital twin serves as a doctor for the robot and indicates that a specific joint will soon fail unless proper maintenance is applied. Engineers can schedule preventive maintenance at the most appropriate times for their operations, thereby reducing the significant costs associated with unplanned downtime caused by equipment failures on the factory floor.
2. “The Dress Rehearsal” (Perfecting New Jobs) : Instead of using an expensive trial-and-error approach for a physical robot, you can use the digital twin to simulate all phases of a complex assembly process, like building a brand new smartphone. In this way, the engineer can practice every phase of the production line until he has eliminated all bugs or inefficiencies. When the engineer is satisfied that the code is correct, he can send the code directly to the actual robot.
In the end, being proactive and optimizing a factory will provide a safer, smarter, and more reliable workplace. With these efficiencies, there will also be a cascade effect that positively impacts everyone.
World Robot Digital Twin Use Cases
| Industry | Robot Type | Digital Twin Use |
|---|---|---|
| Manufacturing | Robotic arms | Predict maintenance & optimize production |
| Logistics | Warehouse robots | Route optimization and fleet coordination |
| Healthcare | Surgical robots | Simulate procedures before surgery |
| Automotive | Autonomous vehicles | Train AI using virtual driving environments |
| Smart cities | Delivery robots | Optimize navigation and traffic interaction |
Example: BMW uses to simulate factory production lines before deploying digital twin for robots in real plants.
Source: Siemens Digital Twin in Manufacturing
https://www.siemens.com/digital-twin
Robotics Digital Twin: Smarter Robotics Through Continuous Virtual Feedback

A digital twin for robotics, which is a continuously updated simulation of the physical robot and its environment, will include an accurate geometric representation of the robot and accurate kinematic representations of the tool, payload, and cell. A digital twin also represents the accurate data flow from the sensors and controllers on the physical robot to create the most complete model possible.
What differentiates a robotics digital twin from other forms of simulation is that the model receives constant updates from the physical robot. As such, the digital twin allows engineers to make better decisions before production time is lost due to an issue. Practically speaking, a robotics digital twin takes data from the robot and converts it into information usable for decision-making, rather than simply logging entries.
In addition to shortening the testing time, a digital twin of a robot can help engineers test for potential collisions, determine reach limits, define safety zones, and meet cycle time requirements during both the design and commissioning phases of a project without affecting the production process. Engineers can use a digital twin to simulate paths, optimize the order of operations, and validate how one robot will interact with another robot, a conveyor belt, or a vision system. In this way, the inclusion of a digital twin in the workflow can greatly shorten the time required to commission a robot by enabling virtual identification and error correction.
Performance Drift can be caused by tool wear, calibration issues, poor part preparation, mechanical failure, etc. The Digital Twin for Robots can allow your team to solve performance drift problems much faster, because you can create digital copies of the problem you’re trying to solve, determine (and test) what variables are creating that problem, then use the Digital Twin to test the solution prior to implementing it in the physical world.
In addition to solving performance drift problems faster, a Robotics Digital Twin enables Predictive Maintenance. Instead of scheduling routine service, maintenance personnel will be able to respond to trending data indicating increased stress or abnormal behavior in the robots. High-mix environments are particularly well-suited to this type of strategy since the payloads and trajectories of the robots are constantly changing. A Digital Twin for Robots not only supports Predictive Maintenance but also manages updates, such as new programs, new parts, and new tooling, by allowing users to virtually test those updates and document how they would affect both quality and throughput.
For a Robotics Digital Twin to be reliable and trusted, organizations must maintain their discipline of entering accurate information, including calibration, tool center points, payload definitions, firmware version numbers, etc., and any changes to the robot layout. If the organization maintains that level of discipline, the Digital Twin for Robots can become the common reference for engineering, operations, and maintenance professionals, facilitating better communication and making their robotics smarter through continuous, measurable feedback.
Data Flow Between Robot and Digital Twin
| Step | Process | Technology |
|---|---|---|
| 1. | Robot collects sensor data | Cameras, LiDAR, IoT sensors |
| 2. | Data trasmitted to cloud | 5G, Wi-Fi, IoT networks |
| 3. | Digital twin updates in real time | Cloud platforms |
| 4. | AI analyzes performance | Machine learning models |
| 5. | Feedback sent to robot | Control systems/APIs |
Example: A robotic arm sends vibration and temperature data to its digital twin for robots, which detects anomalies and suggests adjustments.
Source: General Electric Digital Twin
https://www.ge.com/digital/applications/digital-twin
Step 5: From the Factory to Your Front Door – How Robot Twins Affect You
For example, when a logistics center uses robots (digital twins) to sort packages, the number of mistakes the robots make decreases significantly. So, the logistics center receives items more quickly and makes fewer errors. Consumers receive their online purchases more quickly and with the correct items. Thus, consumers have greater trust regarding their purchasing needs, whether for holidays or weekly groceries.
Another area that new logistics technology is currently addressing is the safety of human-machine interaction. The “Collaborative Robot”, or “Cobot”, is a machine designed to operate side-by-side with human workers. A digital twin for collaborative robots is needed to allow safe testing/simulation prior to actual human-machine collaboration.
There are many opportunities to create digital twins; however, the digital twinning of complex robots (such as cobots), along with the systems required to support them, is not typically done. Currently, the largest hurdles to using digital twins are the high cost of creating a robot digital twin and the complexity of setting one up. As technology improves, ease of use increases and costs decrease, leading to a greater presence of “invisible assistants” in our daily lives, continually improving the environment we live in.
Conclusion:
Creating digital twins will transform “build, deploy, and hope” into a repeatable process that is data-driven using five steps:
- Define the use case
- Develop an accurate model.
- Connect real data to the model.
- Validate through simulated scenarios.
- Continue optimizing your system with the digital twin.
This way, a functionally complete system exists that supports both engineering and operational needs.
The greatest benefits will usually be seen early on. For example, safer testing prior to commissioning, fewer robotic collisions and unforeseen events, faster changeover times, and improved ability to identify the root cause of changes in performance over time.
Over time, the digital twin will become more valuable. It will capture how the robot behaves in your specific environment, including parts used, tooling, schedules, and constraints. This allows evidence-based optimization rather than guesswork.
Creating a digital twin requires Discipline. Just like updating a living thing, reliability depends upon the quality and frequency of inputs and updates. Treat it as a living asset.
Update information about calibration, payloads, tooling, and layout as needed. Track data quality. Document all changes to the digital twin.
When implemented properly, a Digital Twin for Robots becomes a common reference
Q & A:
- Q. What Is A Digital Twin For Robots?
A. The Digital Twin is an exact replica of a physical robot that contains a complete virtual representation of everything within the robot’s work cell. The Digital Twin ties together all aspects of the robot’s movement, its working space, and all operational data associated with it. Therefore, you can safely perform testing and monitoring and improve your robot’s overall performance using this Digital Twin. - Q.How Does The Digital Twin Differ From Normal Robot Simulation?
A. Digital Twins can be fed with live data from sensors, as well as other devices connected to the robot, to show the current state of the system in real time. This is different than most simulation software used today, which is run on a computer in a non-production, static environment. - Q. What Are The Five Key Steps To Create A Digital Twin For Robots?
A. 1) Determine what you would like to accomplish and how you will measure success (KPI), (2) create an accurate model of the robot and workcell, (3) input the model with real-time data, (4) test the model using simulated real-world conditions, (5) continually utilize the model to monitor and improve performance. - Q. Which Benefits Will Teams Get First Using Digital Twins?
A. Faster commissioning of the robot, fewer collisions and reworks, better cycle time accuracy, safer testing of new configurations, and faster problem resolution when performance degrades. - Q. What Typically Causes Digital Twin Projects To Fail?
A. Common problems with Digital Twins include poor accuracy of the model, poor quality of the data being input into the model, poor integration with controller systems, sensors, and the failure to update the digital twin when there are changes made to tools, payloads, layouts, or software.
Garikapati Bullivenkaiah is a seasoned entrepreneur with a rich multidisciplinary academic foundation—including LL.B., LL.M., M.A., and M.B.A. degrees—that uniquely blend legal insight, managerial acumen, and sociocultural understanding. Driven by vision and integrity, he leads his own enterprise with a strategic mindset informed by rigorous legal training and advanced business education. His strong analytical skills, honed through legal and management disciplines, empower him to navigate complex challenges, mitigate risks, and foster growth in diverse sectors. Committed to delivering value, Garikapati’s entrepreneurial journey is characterized by innovative approaches, ethical leadership, and the ability to convert cross-domain knowledge into practical, client-focused solutions.














{kind=link}